Rover, ktorý dokáže zvážiť všetky riziká a navrhnúť bezpečnú trasu k cieľu? Tím z inštitútu MIT navrhol navigáciu budúcnosti
Ak niekedy ľudstvo vyšle rover na povrch planéty mimo Slnečnej sústavy, takáto misia sa nemôže spoliehať na navigáciu zo Zeme.
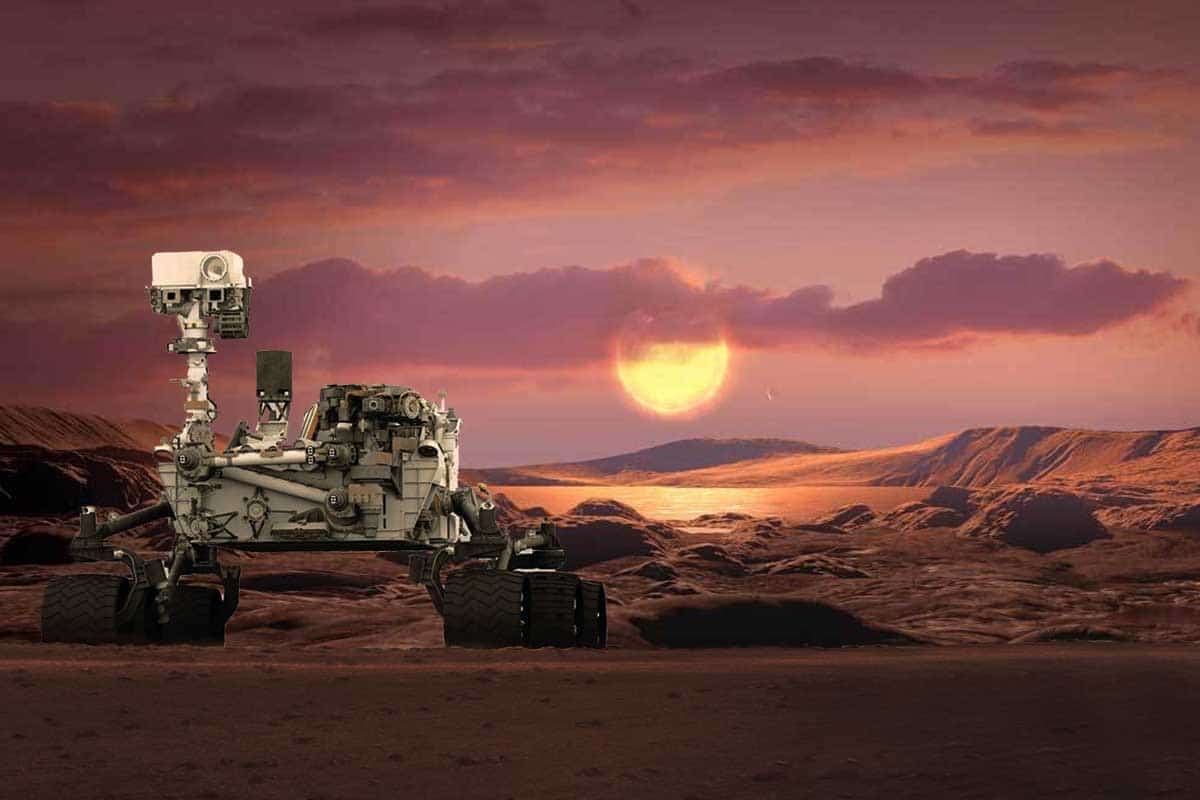
Predstavte si situáciu, ktorá sa môže odohrať vo vzdialenej budúcnosti. Vesmírna sonda sa dostane k exoplanéte v ďalekej sústave a pripravuje sa na zostup cez atmosféru. Po úspešnom pristátí sa vysunie rampa, po ktorej zíde na povrch sofistikovaný rover. Jeho vedecká misia sa práve začína, no aké budú jeho ďalšie kroky?
Momentálne toho astronómovia o planétach mimo našej sústavy veľa nevedia a odhadnúť, akému terénu musí rover na povrchu čeliť nieje prakticky možné. Akákoľvek podobná misia by teda musela byť maximálne autonómna a dostatočne šikovná na to, aby sa udržala v bezpečí. Najbližšia sústava sa od nás nachádza štyri svetelné roky čo znamená, že by trvalo signálu štyri roky kým by sa k planéte dostal a ďalšie štyri roky na to, kým by rover odpovedal. Odhliadnuc od všetkých ďalších problémoch spojených s komunikáciou na dlhé vzdialenosti.
Vedci z technologického inštitútu MIT vyvinuli technológiu, prostredníctvom ktorej by misia dokázala nielen bezpečne pristáť, no plne autonómne vozidlo by dokázalo preskúmať povrch iného sveta v situáciách, kedy je nemožné naplánovať bezpečný kurz. Táto technika umožňuje roveru naplánovať bezpečnú cestu na určené miesto aj v prípade, kedy nepozná svoju presnú polohu ani prekážky, ktorým počas cesty musí čeliť.
„Robotické misie budúcnosti potrebujú schopnosť vnímať riziká počas návštevy vzdialených svetov, o ktorých astronómovia nemajú takmer žiadne informácie. Takýto robot musí vedieť zvažovať riziká a vyvodzovať komplexné, no neurčité modely správania, vyjadril sa jeden z autorov štúdie, Ashkan Jasour.
Plánovanie kurzu v reálnom čase
Nový matematický model umožňuje roveru „vyjednávať“ pri plánovaní svojej ďalšej trasy. Počas plánovania cesty berie do úvahy rýchlosť, spotrebu paliva alebo prekážky, ktorým počas cesty môže čeliť. Na základe týchto cieľov vytvorí trasu a následne zvažuje možné riziká, ktorým by počas presunu čelil.
Vedci z MIT otestovali svoj model na niekoľkých situáciách. V prvej situácii pracovali s plavidlom pod vodou, ktoré sa muselo z neurčitého štartovacieho bodu dostať do cieľa. Na ceste k cieľu sa zároveň stretlo s niekoľkými neobyčajne tvarovanými prekážkami. V 99% prípadoch dokázalo plavidlo nájsť bezpečnú cestu do cieľa. V ďalšej modelovej situácii sa lietajúci stroj dokázal vyhnúť objektom v pohybe a dostať sa bezpečne do cieľa. Záležalo na komplexnosti prostredia, v ktorom sa roboty nachádzali, no algoritmus dokázal vyrátať bezpečnú trasu od niekoľkých sekúnd, až po niekoľko minút.
Neprehliadnite
Momentálne vedci pracujú na optimalizácií systému, vďaka čomu by mohol robot vyhodnotiť trasu oveľa rýchlejšie. Tým sa priblížia k analyzovaniu prostredia a plánovaniu dráhy v reálnom čase. Situácie popísané vyššie boli len počítačovými modelmi. Vedci momentálne pracujú na tom, ako uplatniť tento algoritmus aj v reálnom robotickom stroji.



















Komentáre